论文信息
英文题目:P-RT-BFMT: A Prediction-Based Real-Time Bidirectional Fast Marching Tree for Robot Motion Planning in Dynamic Environments
中文题目:P-RT-BFMT:面向动态环境机器人运动规划的预测式实时双向快速行进树方法
作者:Jin Liu, Ying Zhang, Shaohan Bian, Renjie Song, Cui-Hua Zhang, Yanqiao Wei, Changchun Hua
作者单位:燕山大学电气工程学院;河北省智能康复与神经调控重点实验室
期刊:IEEE Transactions on Industrial Electronics
发表时间:2025年12月
引文格式:Liu J., Zhang Y., Bian S., Song R., Zhang C.-H., Wei Y., and Hua C., “P-RT-BFMT: A prediction-based real-time bidirectional fast marching tree for robot motion planning in dynamic environments,” IEEE Transactions on Industrial Electronics, vol. 72, no. 12, pp. 13627–13636, 2025.
01 全文速览
这篇论文关注的是移动机器人在动态环境中的实时运动规划。说得直白一些,就是机器人已经规划好路了,但前面突然有人走过来、障碍物动起来了,机器人该不该马上重新规划?如果每次看到障碍物都重规划,计算开销太大;如果不规划,又可能撞上。
作者提出的 P-RT-BFMT 很有工程味道:先用双向快速行进树快速找全局路径,再通过碰撞风险预测决定是否触发局部重规划。它不是“频繁重规划”,而是“有风险才重规划”。
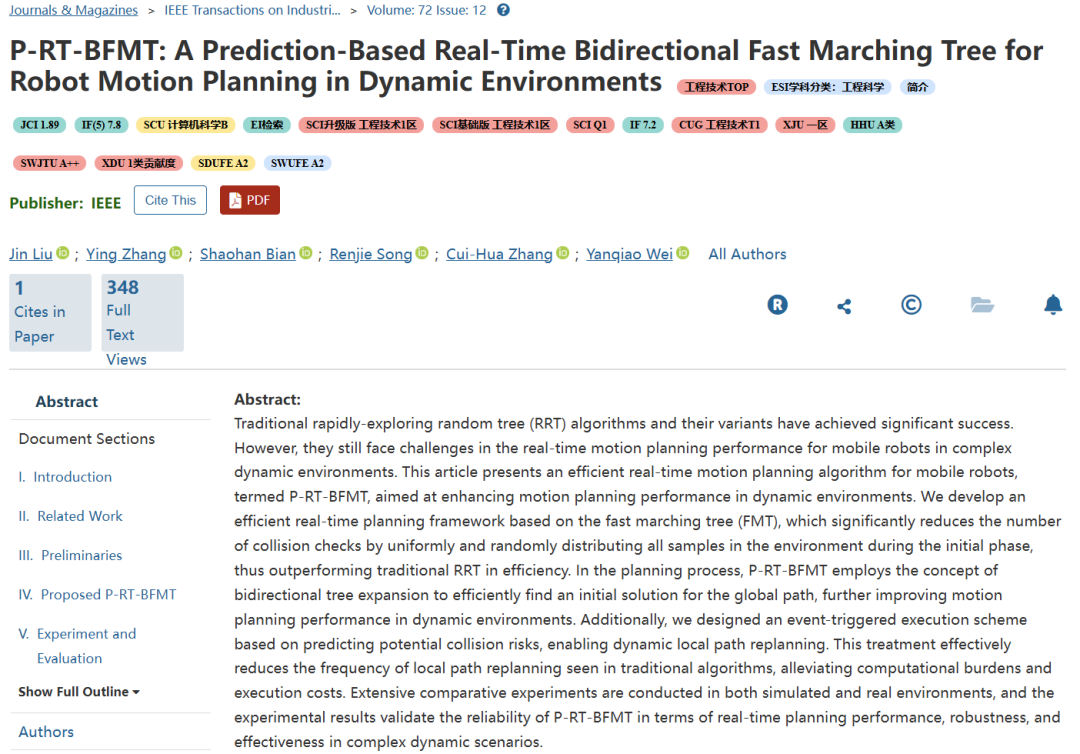
图1:双向树扩展过程。前向树和后向树同时生长,当距离足够近时合并,从而更快形成全局路径。
✅ 亮点1:基于FMT构建实时规划框架,减少无效碰撞检测。
✅ 亮点2:采用双向树扩展,加快初始可行路径搜索。
✅ 亮点3:设计碰撞预测触发机制,降低局部重规划频率。
✅ 亮点4:仿真和Turtlebot3实验证明其在动态场景中更稳健。
02 研究内容
🎯 2.1 为什么不用传统RRT一路做到底?
RRT及其变体在机器人路径规划里很经典,但它的随机采样特性也带来问题:在障碍物密集环境中,很多采样点难以加入树,导致搜索效率下降。RRT虽然能优化路径,但也会增加计算量。对于动态环境,如果机器人还要不断重规划,实时性压力会更明显。
相比之下,FMT先在环境中均匀随机撒点,再利用这些点构建路径网络。这样做的好处是,采样点已经提前分布在地图中,路径搜索时可以减少重复碰撞检测。P-RT-BFMT正是站在FMT基础上,进一步加入“双向扩展”和“碰撞预测触发”。
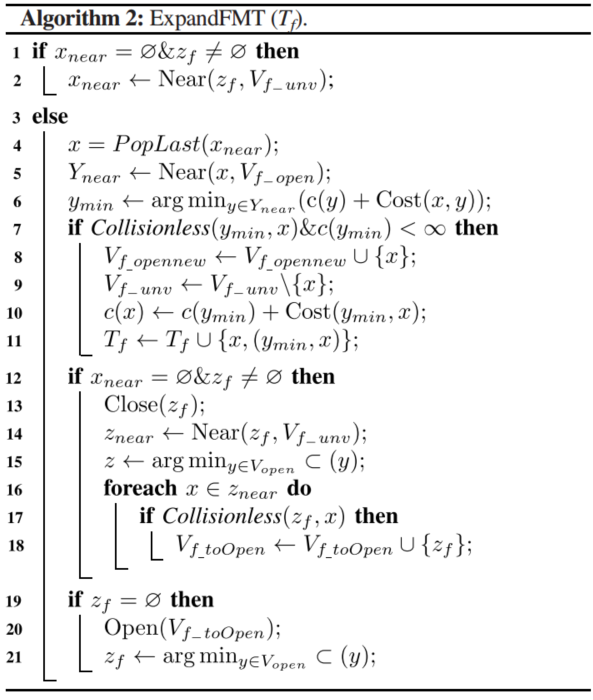
🚀 2.2 双向FMT:先尽快把路接起来
P-RT-BFMT从起点和终点同时扩展两棵树:前向树从起点出发,后向树从目标点出发。当两棵树距离小于阈值时,后向树信息被合并进前向树,快速生成一条全局路径。之后,后向树停止并重新初始化,前向树继续扩展,为动态避障提供路径网络支持。
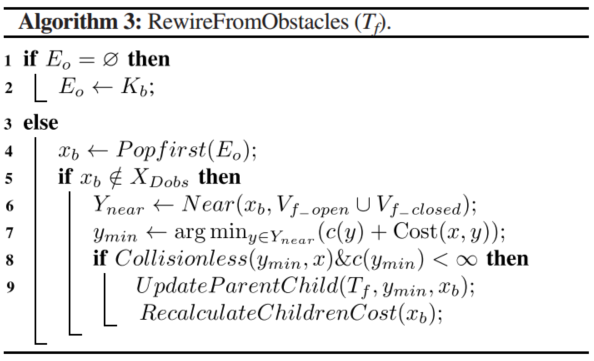
论文中给出了完整伪代码:
Algorithm 1 是P-RT-BFMT主流程;

Algorithm 2 是ExpandFMT树扩展过程;
Algorithm 3 是动态障碍影响下的局部重连;
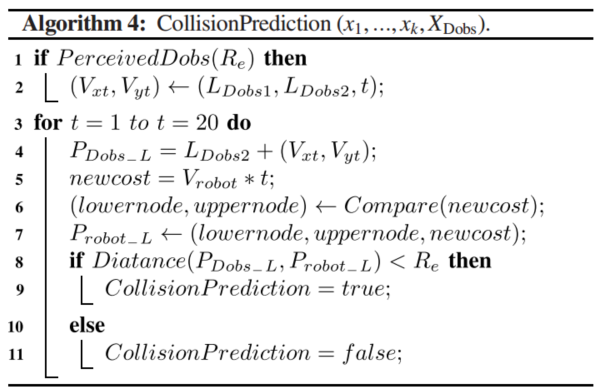
Algorithm 4 是碰撞风险预测。
其中,邻域半径采用PRM形式:

个半径比传统FMT更大,有助于连接更多采样点,提高路径连通性和可行路径发现概率。
🧭 2.3 事件触发:不是看到障碍就重规划
这篇文章最值得关注的地方,是它没有让机器人“遇到动态障碍就重规划”,而是先预测未来是否真的会发生碰撞。
机器人在运行中检测感知范围内的动态障碍物,根据障碍物两个时刻的位置估计速度,然后在未来20秒窗口内,每0.1秒预测一次障碍物位置。与此同时,机器人根据当前全局路径插值估计自身未来位置:

如果预测到机器人与动态障碍物之间距离小于安全半径 (R_s),才触发局部重连;如果没有碰撞风险,就继续沿原路径走。这一设计能显著减少无意义的局部重规划。
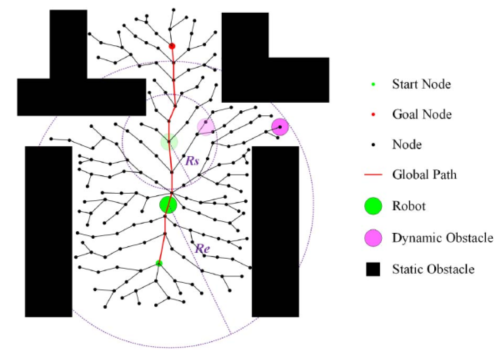
图3:碰撞预测示意图。
🛠️ 2.4 动态重连:只修受影响的局部区域
动态障碍物会让部分树节点变为不可通行。P-RT-BFMT并不推倒重来,而是把被阻挡或重新开放的节点加入列表,只在受影响区域寻找更低成本、无碰撞的连接。这样可以避免全局重规划带来的计算浪费。
同时,当机器人沿路径前进到下一个节点时,树根会更新,相关子节点成本也会随之更新。这使得机器人可以一边移动,一边维护路径树结构。
📊 2.5 仿真结果:动态环境优势更明显
论文在Sample、Narrow和Maze三类环境中进行实验。
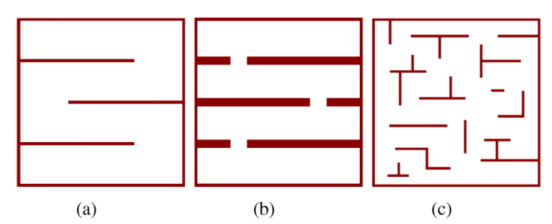

图4:三类仿真环境及迷宫环境下P-RT-BFMT运行效果。
静态环境实验中,P-RT-BFMT达到100%规划成功率;与RT-FMT相比,规划时间约减少40%。动态环境实验中,机器人允许先沿局部路径运动,再继续寻找全局路径。结果显示,P-RT-BFMT在执行代价和到达时间上均优于RT-FMT和RT-RRT,平均相比RT-FMT降低约8%,相比RT-RRT降低约27%。
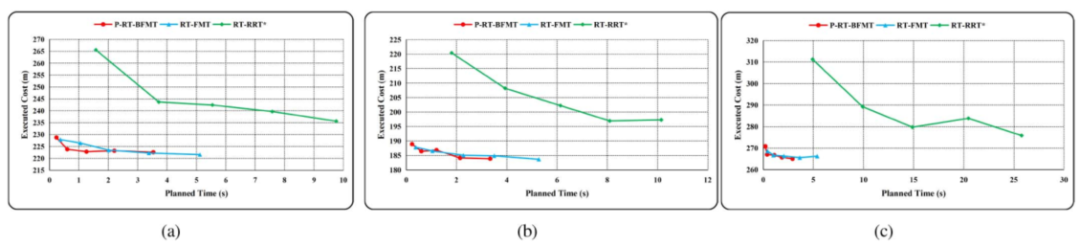
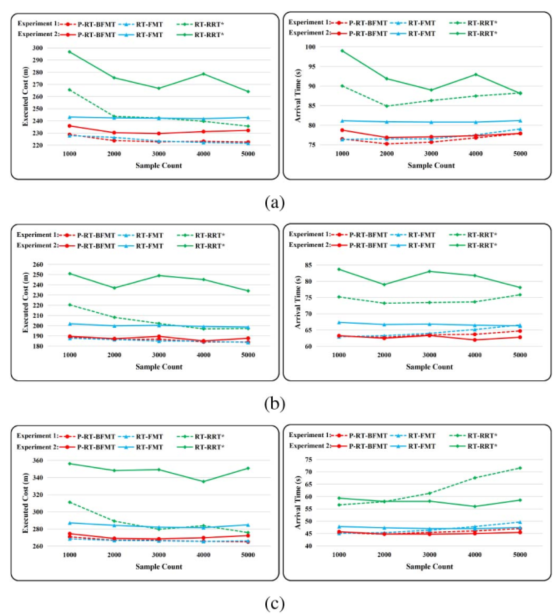
图5:静态与动态环境中规划时间、执行代价和到达时间对比。
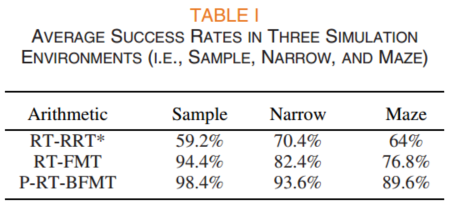
在更复杂的动态障碍实验中,P-RT-BFMT优势更明显。随着动态障碍物数量从1个增加到5个,三种算法成功率都会下降,但P-RT-BFMT保持最高成功率:Sample、Narrow、Maze环境中分别为98.4%、93.6%和89.6%,明显高于RT-FMT和RT-RRT。

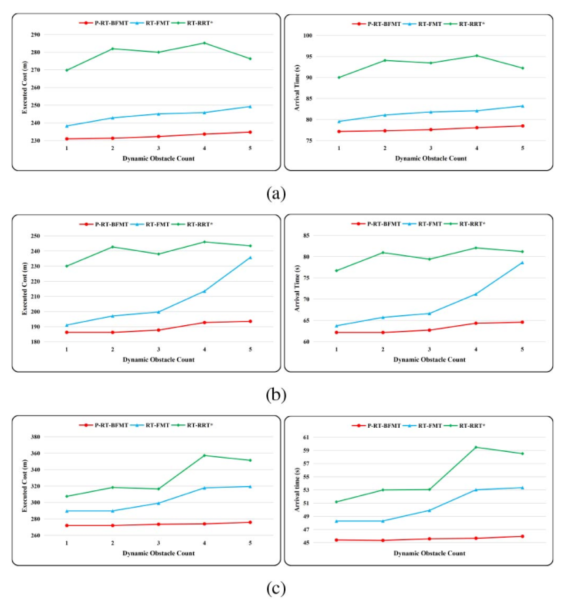
图6:动态障碍环境下机器人运动过程及成功率、执行代价、到达时间对比。
🤖 2.6 实机实验:有人挡路时,机器人会先判断“需不需要躲”
实机部分使用Turtlebot3,在约23平方米室内环境中测试。机器人先规划路径,然后在运动过程中面对两名行人动态干扰。第一个行人虽然挡在运动方向附近,但预测结果显示不会发生碰撞,机器人继续前进;第二个行人带来碰撞风险,机器人触发局部重规划并完成避让。最终机器人安全到达目标点,规划时间为0.31 s,执行路径长度为4.89 m,到达时间为27 s。


图7:真实环境、Turtlebot3运动快照及实机实验数据。
03 创新点
🔍 3.1 用FMT思路提升实时规划效率
相比RRT随机扩树,FMT式预采样与路径网络构建减少了无效搜索。
⚡ 3.2 双向扩展加快初始路径发现
从起点和终点同时扩展,比单向搜索更快获得可行全局路径。
🧠 3.3 碰撞预测让重规划更克制
机器人不是频繁避障,而是预测到真实风险后才触发局部重规划。
🛡️ 3.4 仿真与实机共同验证可靠性
从复杂迷宫到Turtlebot3实机,论文给出了较完整的性能验证链条。
04 总结与展望
这篇论文的思路比较朴素,但很实用:动态环境中的路径规划,不一定要让机器人不停“推翻重来”。更好的方式是先快速得到一条全局路径,再持续观察未来是否会出事;如果预测安全,就别折腾;如果预测有风险,再局部修路。
🔭 未来研究将聚焦于以下几个方向:
1. 扩展到高维空间中的机械臂运动规划;
2. 融合更准确的动态障碍轨迹预测模型;
3. 面向人群环境设计更细致的风险评估指标;
4. 与语义导航、任务规划和多机器人协同结合;
5. 在更复杂真实场景中验证长期运行稳定性。
声明:本文仅供学术交流,版权归原作者所有。如有错误或侵权,请联系更正或删除,欢迎留言探讨。