像鱼一样辨别水流:水下机器人矢量感知能力2
在水下机器人上验证:不仅能测速,还能估计轨迹
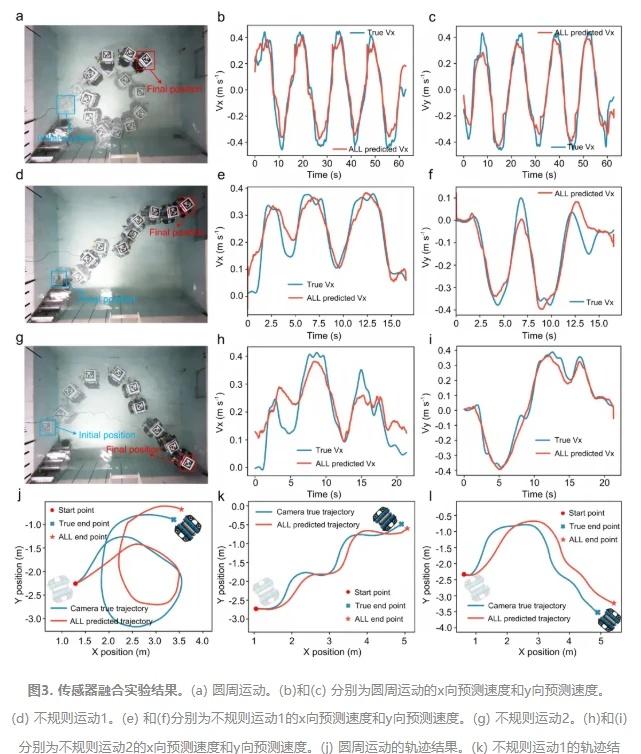
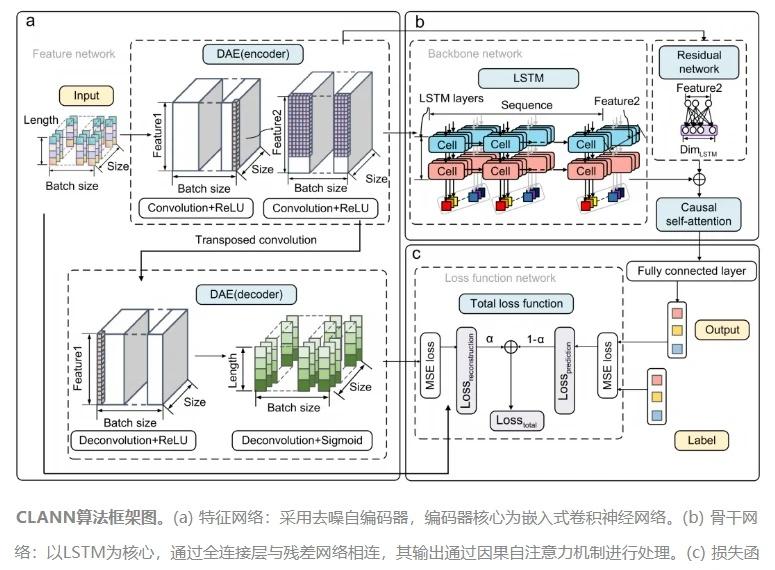
研究人员将传感器安装到水下机器人平台上,开展了直线、圆周和不规则运动等多种实验。在多种复杂扰动条件下,单个传感器结合神经网络算法即可实现水流速度矢量估计,实验效果更符合实际中水下机器人工作时受到自身和外界干扰的情况。实验中,速度大小的平均绝对误差为 0.048 米/秒,方向平均绝对误差为16.49 度,线性相关系数 R² 达到 0.896;基于融合速度信息估计机器人运动轨迹时,位置跟踪平均绝对误差为 0.284 米。
实验还表明,该传感器可在 0 至 0.4 米/秒的速度范围内工作。在大部分测试中,它给出的速度预测比多普勒测速仪更加平稳。机器人运动中的姿态扰动可能影响声学回波,而人工侧线通过贴近机器人表面的流动信息提供了另一条感知路径。
从“感知水流”走向水下自主定位
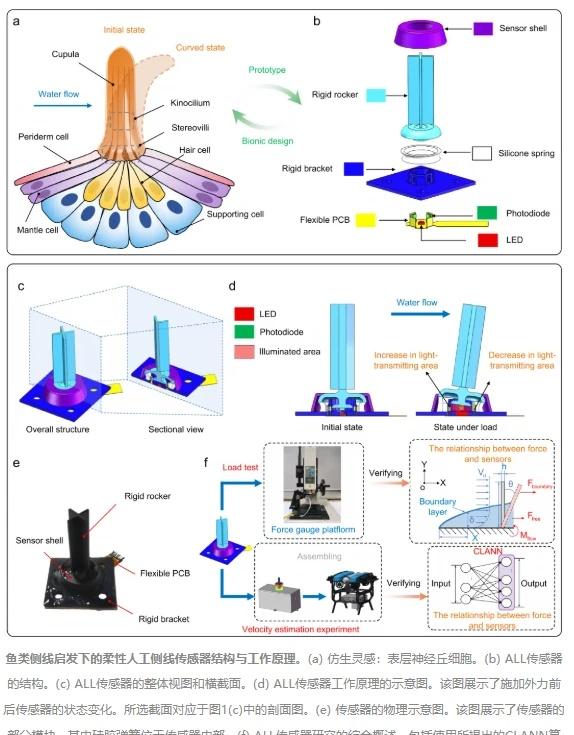
这项研究为水下机器人提供了一种轻量、柔性、可贴合的流动感知方案。与依赖阵列信号融合的传统人工侧线方案相比,该设计尝试用单个传感器单元直接感知速度矢量,为紧凑型水下机器人和仿生机器鱼搭载侧线系统提供了新的可能。
下一步,团队计划进一步优化传感器结构和感知算法,并将其集成到仿生机器鱼平台,在自然水域和多种流速条件下开展验证。未来,人工侧线还可与其他传感器协同工作,帮助机器人构建更大范围的水流场信息,在声学测速设备失效或使用受限的场景中探索长期自主定位。
[赞]相关研究成果发表于《国家科学评论》(National Science Review),题为“Flexible Artificial Lateral Line Based on Luminous Flux for Underwater Velocity Vector Estimation”。
柔性传感器 水下机器人 传感器 神经网络 柔性材料 NSR