技术巡猎 广汽本田 飞行汽车路线规划方法、装置、设备及计算机程序产品。广本也开始整飞行器了吗……这个专利,定义了一个“感知—规划—限速”闭环问题。车在低空环境里需要知道“自己能不能飞、往哪飞、以多快的速度飞”,这也是这份专利的核心。
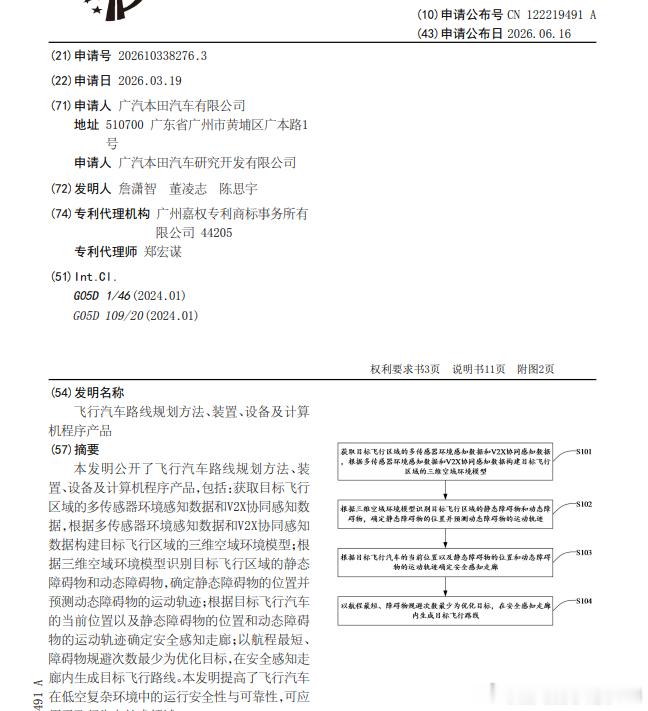
它先用毫米波雷达、激光雷达、高分辨率图像、红外热成像,叠加V2X协同感知数据,构建了一个三维空域环境模型;然后识别静态障碍物和动态障碍物,前者包括高楼、铁塔、电线杆,后者包括飞鸟、无人机、热气球等;接着生成一个“安全感知走廊”;最后在这个走廊里,以航程最短、避障次数最少为目标,生成飞行路线。没有把飞行路线规划写成一个单纯的导航问题,是最有意思的地方。
传统的汽车导航,本质上是在二维道路网上找路线。无人机路径规划,很多时候是在相对开放的三维空间里找到避障路径。但飞行汽车夹在中间,它既不能像汽车一样有着清晰的车道,也不能像小无人机那样可以低成本、低速度、低载荷地“试探性飞行”,飞行汽车一旦有乘客,那么系统冗余、安全边界、响应时间,全部要上一个量级。
因此低空复杂环境里,感知能力和路线规划不能脱节。
你不能只说“我规划了一条路线”,还得回答三个问题:第一,我的传感器看得见多远?第二,看到障碍物以后,系统需要多少时间识别、决策、执行?第三,在这个时间窗口里,飞行汽车当前速度还能不能来得及避让?
这就是专利里“最大有效探测距离、最小安全避让距离、系统响应时长、最大允许车速”这几个概念的价值。它实际意味飞行汽车的规划路线需要和速度要绑定。传感器能力下降,比如雨雾雪导致探测距离缩短,车辆就不能还按原来的速度,因为它“安全决策窗口”变短了。
安全感知走廊也不是一个玄学概念。可以把它理解成飞行汽车在当前传感器可见范围内,扣掉静态障碍物、动态障碍物以及安全避让距离后,剩下来的可通行空间。再结合航迹平滑约束,生成一条飞行汽车真正能执行的路径。地面自动驾驶已经很难了,但它至少有道路边界、车道线、交通规则、车辆行为模式。低空环境的问题是,规则还没完全成熟,障碍物类型更杂,动态目标更不稳定,专利里采用的是卡尔曼滤波预测动态障碍物运动轨迹,这在工程上是比较常规但合理的选择。
至于V2X的协同感知是关键的。专利里提到V2X数据包括空域管制信息和其他飞行器的飞行计划数据,单车传感器再强,也解决不了所有低空交通问题。低空交通真正要规模化,一定不是每台飞行汽车靠自己临场发挥,而是需要空域管制、航路规划、飞行器之间的信息协同,否则城市低空会变成一个三维版的早高峰。
当然了,能飞只是入场券。