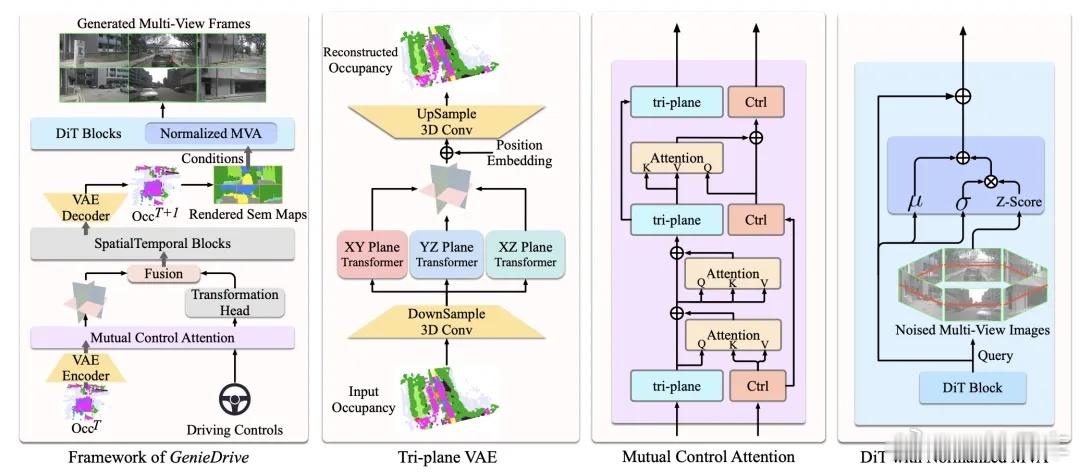
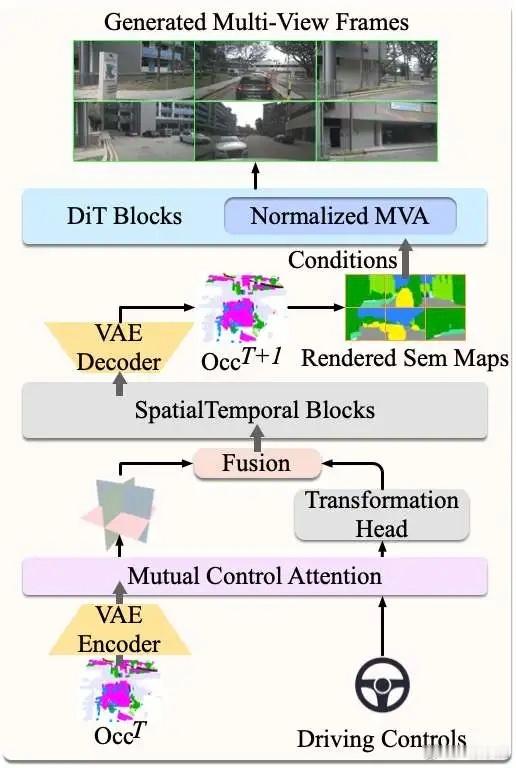
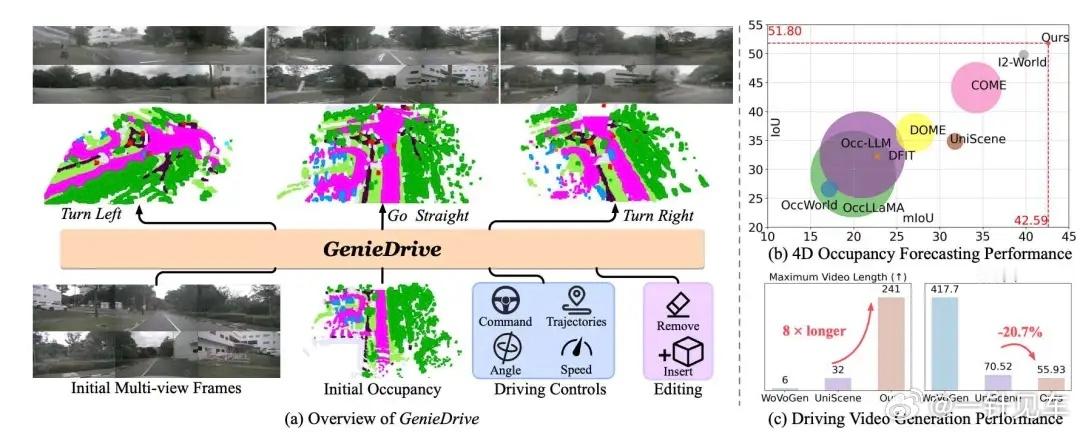
华为与大学共同发表论文,提出GenieDrive,一种以 4D Occupancy 作为中间表示的自动驾驶世界模型框架,在4D占据预测、轨迹可控性以及长时序视频生成能力等方面均显著优于现有自动驾驶世界模型。GenieDrive在仅使用3.47M参数的情况下实现了41FPS的推理速度,并在4D占用率预测mIoU达42.59%,提升7.2%;视频生成FVD指标降低20.7%。GenieDrive使用最少的参数实现了最高的占用预测精度,并促进了8倍更长的多视角驾驶视频生成,且生成质量显著提升。实验表明,GenieDrive能够实现高度可控、多视角一致且物理感知的驾驶视频生成。